Hello. I just got my GDO White installed and when the garage is open, the sensor will randomly report closed and then immediately show open. This seems to happen most often in the afternoon when it is brightest in the garage.
I also see random distances even when the door is closed. Most of the time it shows out of range but will occasionally show a distance. Are these two related somehow?
Here is a log snippet showing the sensor distance even when the door is closed.
|20:28:55|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
| --- | --- | --- | --- |
|20:28:58|[D]|[vl53l0x:310]|'Sensor distance' - Got distance 0.260 m|
|20:29:00|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
|20:29:03|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
|20:29:05|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
|20:29:08|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
|20:29:10|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
|20:29:13|[D]|[vl53l0x:310]|'Sensor distance' - Got distance 1.693 m|
|20:29:15|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
|20:29:18|[D]|[vl53l0x:310]|'Sensor distance' - Got distance 0.133 m|
|20:29:20|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
|20:29:23|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
|20:29:25|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
|20:29:28|[D]|[vl53l0x:304]|'Sensor distance' - Distance is out of range, please move the target closer|
If it turns out that the optical sensor isn’t going to be reliable, can I extend the input for the opener to use a wireless door/window sensor? I see mention of using a PIR sensor with the following code.
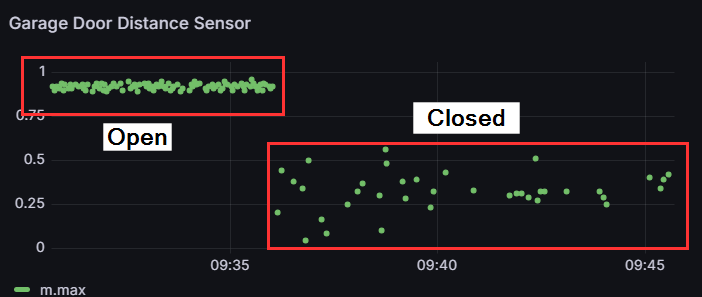
When the garage is closed, it’s normal to see the “out of range” reading. You may occasionally see a reading of the distance to top of your car (if there’s a car parked in the garage) which is also normal. The device assumes that any reading that’s greater than the known distance of the garage door means that the door is closed.
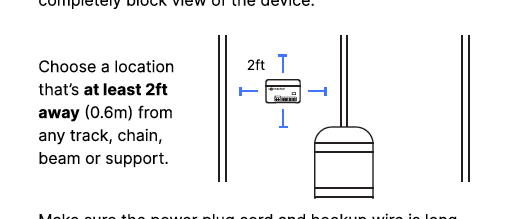
Of concern are the two very low readings in the log that you pasted above – 0.26 and 0.133. This could be caused by the optical beam catching the edge of the garage opener chain track or supports. I recommend mounting the device in a location that’s at least 2ft in any direction horizontally from the chain or track
Based on the scatterplot that you posted when the garage is closed, I strongly suspect that it’s catching the edge of the track or support. This can be solved by just moving the device a foot or so away from the track.
The bright sunlight entering the garage can cause reflections and possibly interfere with the optical sensor. There’s no real magic solution for that except to try to mount it in a location that’s protected from the sun and reflections.
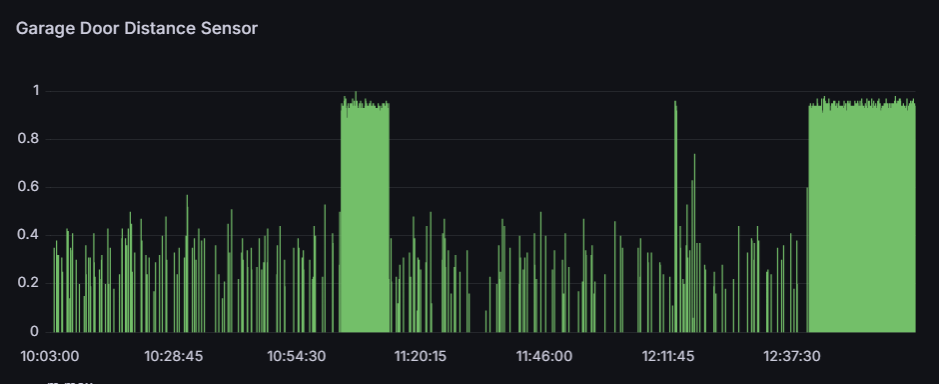
Thanks Nate. I’ve moved the device. The plot you are seeing is after I moved it away from the track. It was about a foot away and now it’s 2 feet away. I’ve also already “modified” the opening a bit to make it slightly larger and made sure the sensor was in the center of the hole. Is it normal to see readings when there is nothing between it and the garage floor (no car, nothing)? Here is the latest data, just in a different visualization. The solidish blocks are the door open at around .91m. The others are when the door is closed. Lots of artifact.
As far as sunlight, the sensor doesn’t have any direct sunlight but I guess it could be a reflection off the car when in the garage. Moving it farther away from where that car is parked will tell if that helps the false closed alerts.
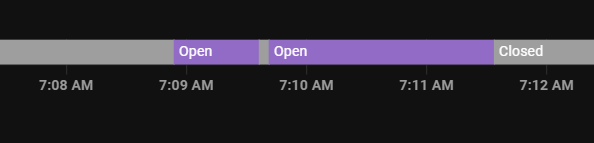
Finally was able to sit and watch the logs to see why the garage door reports closed when it is still open. This is odd. The unit shows distance out of range, changes state to closed and then immediately resumes distance which marks it as open.
Making guesses as to what values to use. Debounce is the one I know least about. The margin of error won’t help the “Out of range” reading but maybe help the readings before and after since at least 2 readings outside the range have to happen to show a state change, according to the docs.
It’s hard to know if these changes helped yet although things seem a bit more stable. That could be coincidence without more testing.
You should set the debounce time higher. At least twice the polling time. I’d suggest setting it to 5 seconds (5s). What this means is that it won’t change the state of the garage door from open to closed (or vice-versa) unless the range sensor shows a consistent reading for at least 5 seconds. So that will eliminate false open/close events due to a single errant reading.
If the polling time is 2s and the debounce time is less than 2s, then that effectively disables the debounce filter.
Ok. I’ll change that. It also leads to another question I already had but hadn’t asked yet. When the garage door opens, it turns on a sensor that we use to determine how far to pull the car in. The delay between the time the door opens and the actual notification from the GDO means that there is a delay in the sensor activating and becoming useful. Sometimes the car is all the way in before getting a garage door open notification.
Is there a balance between speed of alert and debounce/polling, etc?